- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Artikel kanggo ngerti bedane antara motor stepper lan servos lan motor Servo
I. Beda antarane motor stepper lan servos lan motor Servo
Stepper Motor: Apa sinyal pulsa listrik dadi pamindahan sanam utawa pamindahan garis kontrol kontrol mbukak-gelung langkah-langkah Tiri Motor. Cukup, gumantung ing sinyal pulsa listrik kanggo ngontrol sudut lan jumlah giliran. Dadi dheweke mung gumantung sinyal pulsa kanggo nemtokake rotasi. Amarga ora ana sensor, sudut mandheg bisa nyimpang. Nanging, sinyal sing tepat pulsa minimalake panyimpangan kasebut.
Servo Motor: Nglumpukake sirkuit kontrol serovo kanggo ngontrol kacepetan motor, liwat sensor kanggo ngontrol posisi rotasi. Dadi kontrol posisi banget tepat. Lan kacepetan rotasi uga variabel.
Servo (Elektronik Servo): Komponen utama Servo yaiku motor servo. Nganggo sirkuit kontrol motor servo motor + set gear suda. Oh ya, motor servo ora duwe set gear pengurangan. Lan Servo duwe set gear pengurangan.
Ing kasus opervo watesan, gumantung karo porotometer ing batang output kanggo nemtokake sudut setir lengen rudder. Kontrol Sinvo Servo minangka sinyal sing ditiru pulsa (PWM), ing endi mikrokontroler bisa gampang ngasilake sinyal iki.
II. Prinsip dhasar Stepper Motor
Kepiye kerjane:
Biasane rotor motor minangka magnet permanen, lan nalika saiki mili liwat stato muter-muter, stator statrisi nyemplung ngasilake kolom Magnetik vektor. Lapangan magnetik iki bakal nyetir rotor kasebut kanggo muter kanthi sudut, saengga arah saka pasangan sepasang lapangan magnetik ing rotor kasebut bakal padha karo arah lapangan Magnetik Stator. Nalika kolom Magnetik Vektor Starator muter dening sudut. Rotor uga muter kanthi sudut kanthi lapangan magnet iki. Kanggo saben pulsa listrik input, motor muter siji langkah sudut maju. Pamindahan sudut output yaiku proporsi kanggo jumlah pulsa input, lan kacepetan rotasi yaiku proporsi frekuensi definasi. Kanthi ngganti tatanan ing ndhuwur tumpukan sing pinunjul, motor mbalikke. Mula, nomer lan frekuensi pulsa lan tatanan energi kanggo nggulungake saben fase motor bisa dikendhaleni kanggo ngontrol rotasi motor stepper.
Prinsip generasi panas:
Biasane ndeleng kabeh jinis motor, internal minangka inti wesi lan tumpukan tumpukan. Tungkak, kekuwatan bakal ngasilake kerugian, ukuran kerugian lan saiki yaiku proporsi ing alun-alun, sing asring dirujuk minangka rugi tembaga, yen saiki dudu standar dc utawa gelombang saring; Intine duwe efek saiki Hysteresis eddes, ing lapangan magnetik ganti uga ngasilake kerugian, ukuran materi, saiki, frekuensi, voltase sing ana hubungane, sing diarani wesi kelangan. Mundhut tembaga lan wesi bakal diwujudake kanthi bentuk generasi panas, saéngga mengaruhi efisiensi motor. Ngajokake motor umume ngupayakake akurasi posisi lan output torsi, efisiensi luwih murah, saiki luwih gedhe, lan kahanan sing luwih gedhe, lan kahanan kasebut luwih serius tinimbang motor sing umum.
III. Konstruksi Rudder
Servo utamane dumadi saka omah, papan sirkuit, motor drive, reducer gear lan unsur deteksi posisi. Prinsip kerja yaiku panrima ngirim sinyal menyang servo, lan IC ing papan sirkuit nyebabake motor inti, lan ing wektu sing padha, detektor posisi kasebut ngirim tandha apa sing bakal teka ing posisi utawa ora. Detektor posisi iku sejatine resistor variabel. Yen servo muter, nilai resistor bakal ganti kanthi tepat, lan sudut rotasi bisa dingerteni kanthi ndeteksi nilai resistor. Umum Servo Motor minangka kawat tembaga sing lancip sing dibungkus rotor telung cagak, nalika saiki mili liwat Coil bakal ngasilake lapangan magnet, lan pinggiran magnetik kanggo ngasilake repulsion. Miturut fisika, wayahe inersia obyek langsung proporsional menyang massa, saengga luwih akeh massa obyek kasebut kanggo muter, luwih gedhe kekuwatan sing dibutuhake. Supaya bisa entuk kacepetan rotasi kanthi cepet lan konsumsi tenaga rendah, servo digawe saka kabel tipis tipis dadi cylinder sing apik banget, dadi cagak kothong sing entheng, yaiku magang-silinder sing ana ing njero silinder.
Supaya cocog karo lingkungan sing beda-beda, ana rancangan anti banyu lan dustroof; Lan kanggo nanggepi syarat beban sing beda, ana gears plastik lan logam kanggo servos, lan gear logam kanggo servos umume torsi dhuwur, kanthi kauntungan gedhe, kanthi kauntungan ora bisa dicelup amarga akeh kakehan. Servos kelas sing luwih dhuwur bakal dilengkapi karo bantalan bal kanggo nggawe rotasi luwih cepet lan luwih akurat. Ana prabédan antarane balung bal lan rong bantalan bal, mesthi bantalan bal kasebut luwih apik. Servos Fet anyar utamane nggunakake transistor efek (lapangan area), sing nduweni kauntungan saka resistensi internal sing kurang lan mulane kurang kerugian saiki tinimbang transistor normal.
IV. Prinsip Orvo Operasi
Saka gelombang pwm menyang sirkuit internal kanggo ngasilake voltase bias, penjaduan terbatas liwat gaman abang kanggo mindhah, supaya bedane voltase yaiku nol, supaya bisa nggayuh efek servo.
Protokol kanggo servo pwms kabeh padha, nanging servis paling anyar katon beda.
Protokol umume: jembaré level dhuwur ing 0.5ms ~ 2.5ms kanggo ngontrol servo kanggo ngaktifake sudut sing beda.
V. Kepiye Motors Servo Bisa
Tokoh ing ngisor iki nuduhake sirkuit kontrol motor servifier sing digawe kanthi amplifier operasional listrik LM675, lan motor minangka motor DC Servo. Kaya sing katon saka tokoh kasebut, kekuwatan operasional amplifier LM675 diwenehake dening 15v, lan voltase 15v ditambahake ing RP 1v, lan voltase output ditambahake ing input motor servo. Motor dilengkapi generator sinyal kecepatan kanthi deteksi wektu nyata saka kacepetan motor. Nyatane, generator sinetron kecepatan minangka jinis generator, lan voltase output kasebut proporsi kanthi kacepetan rotasi. Output voltase saka Generator Signal General Generasi G bisa bali menyang input saka amplifier operasional minangka sinjuit kesalahan kacepetan sawise sirkuit rahim voltase. Nilai voltase sing disetel dening rp1 kanthi cepet ing RP1 ditambahake menyang input in-fase saka amplifier operasional sawise divisi voltase kanthi R1.R2, sing padha karo voltase referensi.
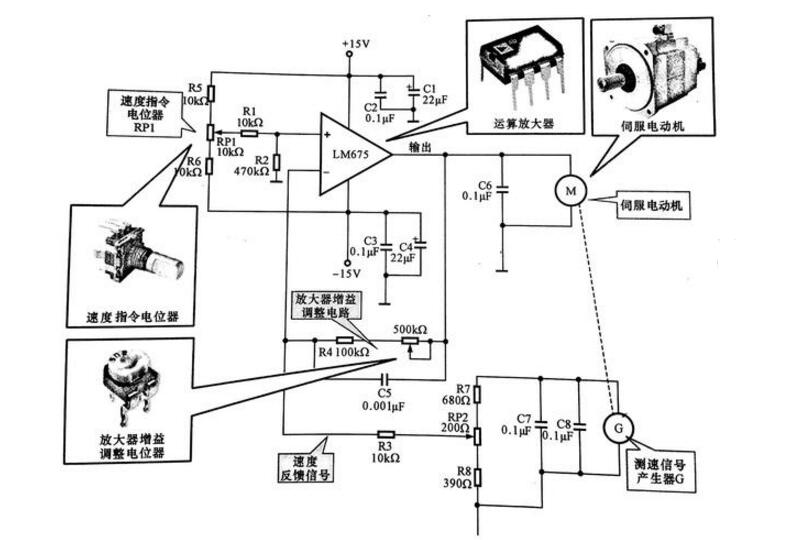
Kontrol skematik motor servo
Servomotor: dituduhake dening huruf M kanggo server, minangka sumber daya kanggo sistem drive. Amplifier Operasional: Ditampilake dening jeneng sirkuit, i.e., LM675, minangka potongan amplifier ing sirkuit kontrol servo sing nyedhiyakake drive saiki kanggo motor servo.
Potentiometer pipen kacepetan RP1: Nyetel voltase referensi saka amplifier operasional ing sirkuit, i.e. setelan kacepetan. Amblifier Gain Pototen Pototen Rp2: Digunakake ing sirkuit kanggo nggoleki amplifier lan ukuran sinyal rezeki, masing-masing.
Yen mbukak motor ngganti, voltase panganan bali menyang input saka amplier operasional uga owah-owahan, lan bedane antara voltase sing mandheg, lan voltase output mundhak, lan voltase output mundhak, lan voltase output amplifier operasional mundhak. Kosok baline, nalika mbukak dadi kecepatan motor mundhak, voltase output mundhak, lan voltase reregtal mundhak, saéngga voltase outplier kanthi cepet, lan kecepatan rotififer kanthi otomatis.